伴我启航
737本场 ILS 进近着陆练习
一、简 介
这次结合自动驾驶仪的使用,介绍一条在广州白云机场进行的本场ILS进近航线,进近时要进行典型的“程序转弯”(Procedure Turn),这条航线一个起落的飞行时间仅15分钟,很适宜用作737的仪表飞行练习。
整个航迹在水平方向上的投影是“8”字形的,与以前介绍的矩形五边起落航线不同。它与真实的 复飞程序 + 程序转弯进近程序 很相似(见白云机场进近航线图)。只是为适应程序转弯,将Rwy 21的正常复飞程序中的转弯方向改变一下。
改变后的航线会令飞机飞越广州市区上空,且离机场旁边的白云山很近,这点在实际飞行中是不允许的,但在FS98中,这点就并不重要,因为我们只是为了提高飞行技术而建立一条适合练习的航线,不影响安全。(以后还会带大家找到天安门广场,练习目视进近,并将737降落到广场上去!)
二、航线组成
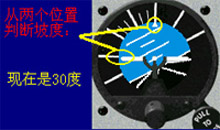
A、水平方向 1、Rwy21 起飞然后左转飞向 QX NDB。 2、“程序转弯”:飞越 QX 后沿359度航向飞行1.5分钟,然后向右作180度转弯至航向179度。注意,这里的1.5分钟直线段航线与跑道中心线夹角为30度。完成转弯后,夹角仍是30度,只是方向相反。 3、以刚才形成的30度切入角状态切入ILS航道进近着陆。 可见,QX NDB 基本上是水平“8”字的中心。 |
|
B、垂直剖面 1、起飞后爬升至2000英尺,开始左转,转弯过程中继续爬升至3000英尺并保持。 2、飞越 QX 后开始下降高度,1.5分钟内降至2000英尺并保持 。 3、切入ILS后根据GS信号进近。 |
C、速度限制 起飞后到达 QX 前不超过210节,1.5分钟直线航段表速200节,程序转弯表速不超过205节,现用190节。 |
三、具体操作
1、起飞前准备:
熟悉上述飞行航线,检查飞机各系统状态、各手柄位置,调节无线电设备频率、预置自动驾驶仪参数:
| ATIS | 128.6 | 收听天气广播,根据场压检查高度表设置(经常是29.91) |
| Nav1 | 109.5 | Rwy 21 ILS 频率 |
| ADF | 243 | QX NDB 频率 |
| Course | 209 | 着陆跑道航向 |
| HDG | 359 | 程序转弯直线段航向(与跑道夹角30度) |
| Alt | 3000 | 起飞后到达QX NDB前的航线高度(英尺) |
| SPD/Mach | 200 | 目标速度200节 |
| VS | 2200 | 起飞后爬升段的爬升率(feet/min) |
放襟翼5度(按F7三次),升降舵配平(Trim)回中(Home和End键),将飞机滑行到 Rwy 21 后,注意此时高度表读数(即接地区标高,TDZE),心算并记住着陆时的收油门高度(TDZE+50英尺)和决断高度(通常 DH = TDZE+200英尺)。
当然,如果进近时场压发生变化,这些数据也相应改变。
2、起飞
推油门杆至 96% N1,加速滑跑,V1=150节,Vr=151节,V2=160节。到达Vr后拉杆抬头到10-15度(ADI上指示中心的小四方框在第二和第三条刻度线间)。飞机离地后保持好抬头姿态,很快就越过V2。确定正上升率后,收起落架。飞机地高400英尺以上,就可以接通自动驾驶仪(Z键)并按下“Alt”按钮,让飞机以2200feet/min的爬升率上升。
地高1000英尺以上时,收油门至爬升推力,88% N1。随着表速的增加,逐渐收起襟翼。
3、转弯飞向 QX NDB
地高2000英尺时,向左压约25度的坡度进入转弯。
高度表接近3000英尺时,快速收油门至55%N1左右。自动驾驶仪会让飞机保持3000英尺的高度。 调整油门杆,让飞机表速降至200节,然后接通自动油门(Shift-R),按下“SPD”按钮,保持200节。
根据RMI上的绿针(ADF)指示,逐渐改平坡度,让绿针正好指向正前方,飞向 QX NDB。
注:由于下一段航线的航向是359度,我们希望能以该航向飞向QX,这样就不必在飞越QX时做转弯动作,既减轻进入后一航段时的工作量,又提高领航精度。 方法: 在将要改出起飞后的左转弯时(即绿针将要转到正前方时),就应注意RMI外圈的刻度,看绿针所指的位置在359度的左边还是右边:
A、如果绿针指在外圈刻度359度的右边,就应减小些坡度,让飞机转慢些,或干脆改平坡度,绿针会随飞机的前进,逐渐作反时针方向旋转,当绿针指到外圈刻度359度处时,马上将飞机左转至航向359度(根据HSI上的航向指示),此时可见,RMI的绿针也正好指在正前方(即QX NDB在飞机正前方),这样就提前对准了下一航段的起始航向。
B、如果绿针指在外圈刻度359度的左边,则应迅速加大坡度,让飞机转弯至绿针指在正前方偏右并保持(就是要转过头,让飞机向NDB的左边飞去)。随着飞机的前进,绿针会作顺时针旋转,指到外圈刻度359度处时,马上向右压坡度,将飞机转至359度磁航向(HSI上的指示)。此时RMI的绿针也正好指在外圈刻度359度处。
以359度航向对正QX NDB后,按下自动驾驶仪上的“HDG”,保持该航向。
4、直线段航线
飞越QX NDB后(注1),绿针指向后方,就开始这90秒钟的直线航段了。一开始就要做好几个操作:
(1)按下仪表板左侧的航空时钟的复位键,秒表开始计时。
(2)调整自动驾驶仪控制面板上的高度值,由3000减小至2000。同断开自动油门(再按Shift-R,这点可提前到达QX之前完成,以减小工作负荷),收油门至约35% N1。
(3)调整自动驾驶仪控制面板上的下降率VS,由-1800减为-1200。
(4)随飞机的下沉率的增加,适当微调油门,保持表速200节。
这几个操作要又快又准,但有一种从容不迫的方法:飞越QX NDB时,立即按下 P 键,暂停FS98,做好上述前三项操作,再按 P 键做第四项操作。这是模拟有副驾驶员,在帮你做一些辅助工作。以免你手忙脚乱。
飞机下降到接近2000英尺时,自动驾驶仪使下沉率减小,这时就要逐渐增加油门回到约55%N1,以令表速维持200节,到达2000英尺后,再微调油门,保持200节。由于FS98的自动油门反应不够快,下一步的调整要求较高,所以这里不接通自动油门。直到跟踪上ILS后才接通。
这时,1.5分钟将要过去了。断开自动驾驶仪上的“HDG”,准备下一步----右转弯。
| 注1:如何判断飞机什么时候飞越 QX NDB 呢?由于这架737的RMI较小,读数不很清楚,很难做到在QX的正上方通过,绿针就很少会一下子由指前跳到指后。由开始旋转到指向后方,一般都要好几秒钟,这段时间内,什么时候按下航空时钟开始计这1.5分钟呢?幸好,QX是在跑道延长线上的,即在ILS的LOC信号带的正中央,我们知道,飞机从LOC中央的这边飞到那边时,HSI的LOC双针是会相应从一边移到另一边的,且QX离跑道入口不远,LOC指针的偏转精度很高。我们起飞前已经调好HSI。所以,可以在HSI的LOC双针扫过HSI中央的瞬间开始计时,这点就是飞机飞越跑道延长线的地方。这样,误差就只是使整个“程序转弯”的泪滴形航线作平移,还可从飞越时RMI绿针顺时针转还是反时针转来判断这个平移是移离跑道还是移向跑道。 |  |
5、180度转弯
直线段到达1.5分钟后,确认已断开自动驾驶仪上的“HDG”,向右压约25度坡度转弯,注意压坡度不要压得太“猛”,即飞机滚转率不要太大,否则自动驾驶仪难以维持高度的稳定。转弯过程中要保持少许压杆力,以免飞机自有的横侧稳定性令坡度减小,造成转弯率不足。
在开始转弯的同时,分级将襟翼放至5度。
转弯和放襟翼都会令飞机减速,应适当加些油门,让飞机以190节速度转弯。速度切勿过高。否则易造成转弯半径过大。影响下一步切入ILS。
改出转弯:从359度转过180度,目标航向为179度。到达时,如果ILS双针还未开始移动,减小坡度或干脆改平,以30度切入角切入ILS;如果HSI的双针开始移动,则继续转向209度切入ILS。
开始改平时,收油门至50-55% N1,让飞机自然减速,以利于平稳切入ILS。
| 坡度对这个长时间的“程序转弯”很重要:压坡度不够,很容易冲过LOC中线,造成以后的操作时间不充足,进近就不够平稳,压坡度过大,造成转弯操纵不平稳、太迟切入LOC,也不利于往后的操作。这架737本身的ADI刻度线不清晰,不利于判断准确的坡度。可以“加装”一个易读的ADI,只要将737的仪表板文件修改成这样就行了:panel.cfg |
|
6、切入ILS进近
根据HSI的双针移动快慢和飞机的转弯率,操纵飞机转至航向209度(或仅差2-3度),同时让HSI双针移到中央位置附近(偏差少于双针距离的一半),接通自动驾驶仪上的“APR”,跟踪LOC信号。注意此时“ALT”仍然亮着,还在保持2000英尺高度。由于刚才退出转弯时收了些油门,飞机一直在慢慢减速。
随着飞机的前进,GS信号激活,菱形GS滑块开始向下移动,此时,放下起落架,飞机继续减速,起落架锁定后,分次将襟翼放至25度(随飞机减速按三次F7键)。
GS滑块移到中央位置后,自动驾驶仪的“ALT”灯自动熄灭,开始跟踪GS信号,令飞机的下沉率逐渐增加至700feet/min左右,GS滑块将要回升到中央位置时,再按F7两次,襟翼全张。GS很快就保持在中央位置。
此时,微调油门使表速在140节左右,然后将自动驾驶仪上的“SPD”数字减为140,接通自动油门,按下“SPD”保持进近速度。再按 Shift - / 将减速板预位。飞机就稳定的进近。
注:放襟翼的时机很灵活,因为它既令飞机减速,又令飞机瞬间抬头,减小下沉率,可巧妙运用,“帮助”自动驾驶仪跟踪GS信号。 但放襟翼是有速度限制的,以免“吹坏”它:
1-5度 < 250节 10-15度 < 215 节 25度 < 190 节 30度 < 162 节
7、着陆
自动驾驶仪可操纵飞机作自动着陆,但FS98的自动驾驶仪精度不高,不可能做到平稳接地。降至决断高度(DH),按 z 和 Shift-R 断开自动驾驶仪和自动油门。如需要,适当作微小调整,目视进近,在离地50英尺处,收油门至怠速,同时进行“拉平”(Flare):轻拉杆减小下沉率,以3-5度上仰姿态角作两点接地,并让前轮自然落下。由于减速板已预位,后轮接地时它就自动张开。前轮落下后,按住F2,发动机反推减速,表速减至60节时,按F1收回反推。用轮刹减速,收回襟翼和减速板,操纵飞机滑行离开跑道。
如果进近不稳,或感觉情况不妙,应该果断的执行复飞程序,再飞一个“8”字。
|
|
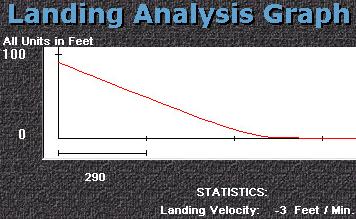
最近进近时的前视景、着陆航迹 及 接地瞬间下沉率 |
熟练后,应少用自动驾驶仪(或其部分功能),多练人手操作,提高驾驶技术。另,自动驾驶仪有时会出错,例如:过了GS中点位置,Alt还保持在2000feet,或起飞后飞过3000feet还继续爬升,又或者自动油门虽接通,但失效。 这时就需要人手操作。
为进一步提高技术,可练飞夜间飞行、低能见度飞行、穿云飞行、侧风飞行、模拟单发停车......
----1999年4月1日
[返回]